NYX Troubleshooting Guide and F.A.Q.
This guide covers the NYX Strain wave mounts
Frequently Asked Questions
Check our guide here
The mount can handle up to 20Kg / 44 pounds of payload.
Please note that a long and heavy optical tube (E.g a 150m refractor or a 10inch Newtonian telescope) will result in greater forces on the mount’s mechanical parts and especially on the RA axis.
DEC axis can be easily balanced by sliding the telescope back and forth on the saddle plate.
A counterweight (close to 5Kg) will help the mount to better balance the load and provide better tracking. However, below 18Kg of equipment, even if the optical tube is long, the counterweights are useless.
By adding counterweights you can increase the payload of the mount up to 30 Kg (66 pounds). In this case, you will definitely need a heavy-duty tripod to avoid stability issues due to vibrations, any slight wind, etc.
A long and heavy OTA can easily tip over when the mount is in ALTAZ or EQ mode. Extra caution should be taken care to check the stability of your setup during mount slewing.
Pegasus Astro has implemented a strain wave gearing reduction system (stain wave with belts in both axes) that offers low period errors and high torque. A guiding accuracy can be less than 0.5 arcsecs (usually between 0.4 – 0.8 arcseconds).
We have seen that the periodic cycle of the strain wave gear produces a higher PE offset during the two first minutes, a very calm tracking in the next 3 minutes, and a higher PE shift in the last 2 minutes.
In total, the period is 7.16 minutes or 430 seconds. Our gears have a measured periodic error of +-20arcsec or less.
A strain wave gear has different periodic error characteristics compared to worm gears. Strain waves can change the PE magnitude based on the load and direction of the telescope. Therefore, it is hard to apply a PE profile in each gear.
However, as the periodic error can be repeatable on the same load, we can train the guiding system to adapt and compensate for this error. [check guide for Predictive PEC]
You need to roughly balance your equipment on the Declination Axis.
The declination axis motor can easily handle your telescope weight but as there is no power-off brake on the DEC axis, It is highly advised to balance the telescope on this specific axis.
If your 3rd party tripod supports the classic EQ6 mount then you can stack it with our EQ6 adapter (PEG-ADAPT101-EQ6) and place the NYX-101 on top of it.
Classic EQ6 uses the same counterweight shaft/rod and weights.
The Nyx-101 supports 2 modes of wireless connection:
- Via a wireless access point, i.e. both the mount and your PC or laptop device connect to the same wireless 2.4GHz network.
- Via Nyx ‘s “Wi-Fi hotspot” feature. In this scenario, you connect your mobile device (by using our Unity Mobile Application available for IOS and Android) to the Nyx ‘s Wi-Fi hotspot.
There are reports that ESP devices (NYX-Mounts use an ESP controller) cannot connect to some specific access points without additional tuning in Wi-Fi access point settings.
These reports currently affect a wide range of Ubiquity Access Points..
If your NYX-Mount cannot connect as a client to your Wi-FI network please ensure the following
- Your Wi-Fi is a 2.4GHz network
- Authentication method is WPA2-Auto
- WPA encryption is: (AES+TKIP)
- SSID is something that has 6 characters at least.
- WPA Algorithms: CCMP-128 (AES)
- WiFi SSID and Password do not contain spaces or the # character.
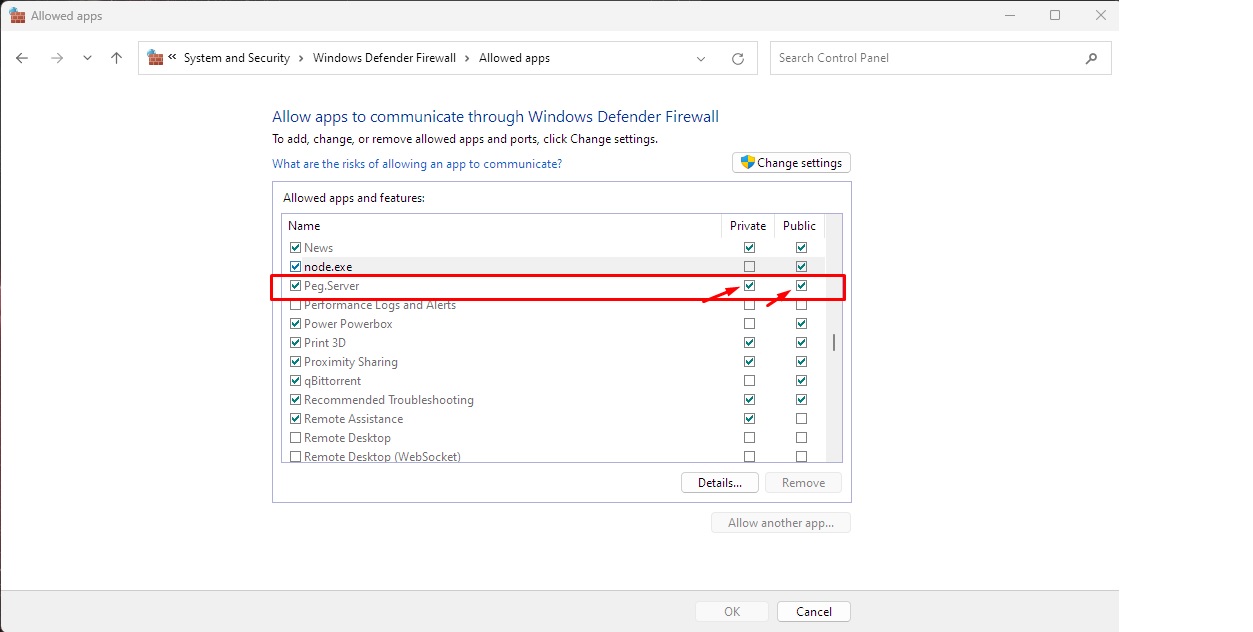
# is used for LX200 protocol and cannot be used inside an ssid or password. - Windows Firewall / Defender or any other anti-malware software that controls network access lists. e.g MalwareBytes is temporarily disabled.
If your access point is a Ubiquity brand please check below:
We’ve observed cases where firmware updates fail while the Windows Mobile Hotspot is active.
To ensure a successful NYX-Mounts firmware update, please make sure to turn off the Mobile Hotspot by sliding the switch to the ‘off’ position before proceeding.
NYX-Mounts works with ASIAIR out of the box. Important functionalities of the mount can be easily controlled via USB cable connectivity and by selecting the “OnStep Electronics” driver.
Please note that we have provided a dedicated NYX-Mounts INDI driver but currently ZWO does not include it in the ASI AIR, so the OnStep Electronics” driver is a substitute for our official driver.
Select “Serial” and Baud Rate to “115200”

Connect to mount:

Make sure that you have enabled in Guide settings the “Auto Flip DEC Output After Meridian”.
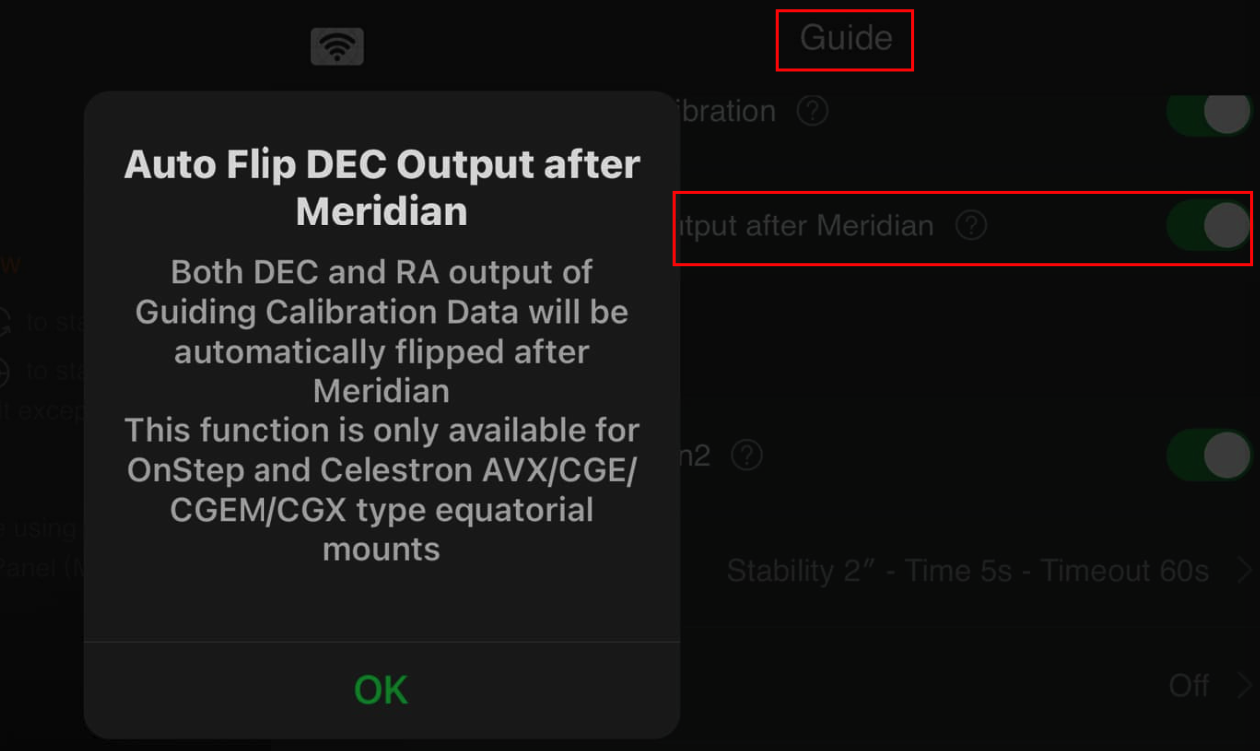
You are ready to roll!
Yes absolutely, there is a dedicated driver in the INDLlib framework.
Please note that, currently, the driver works with USB Cable connectivity only. Make sure you have the USB cable of your NYX-101 connected.
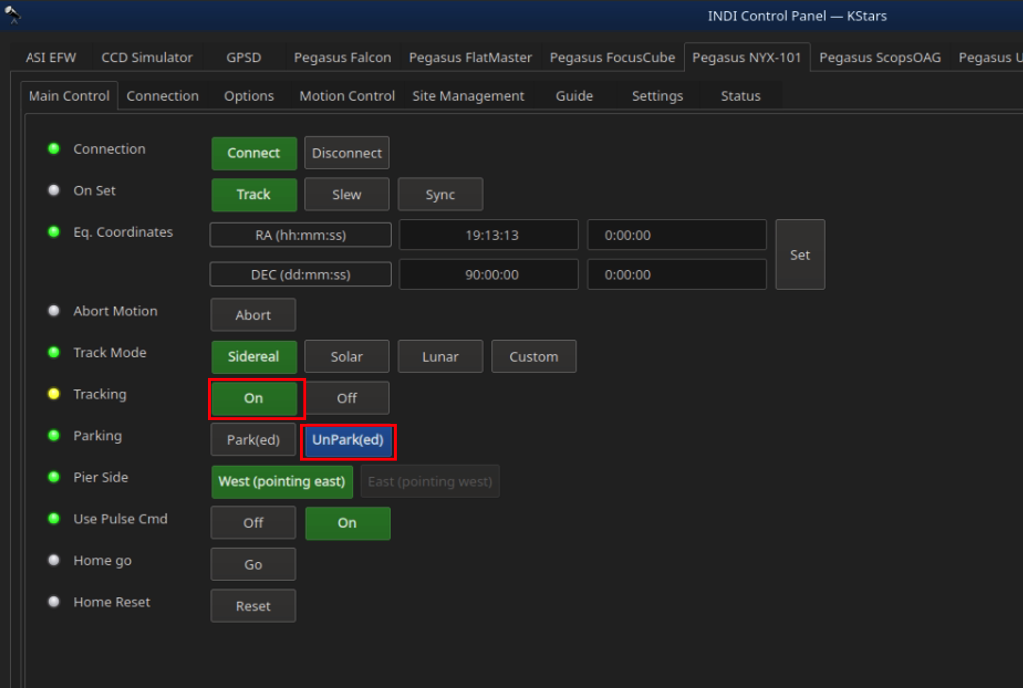
- Select our dedicated INDI driver named “Pegasus NYX-101“
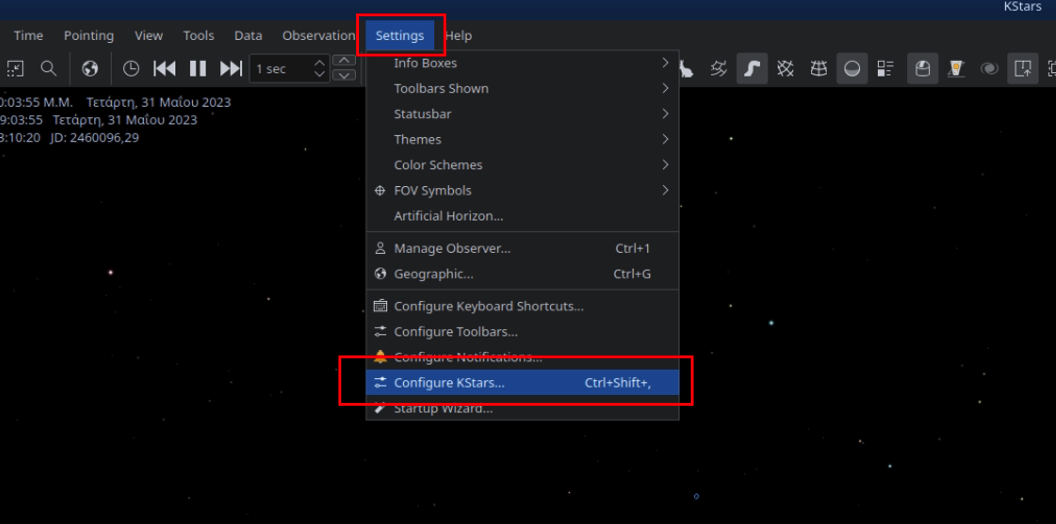
- On Kstars click Settings and select “Configure Kstars“

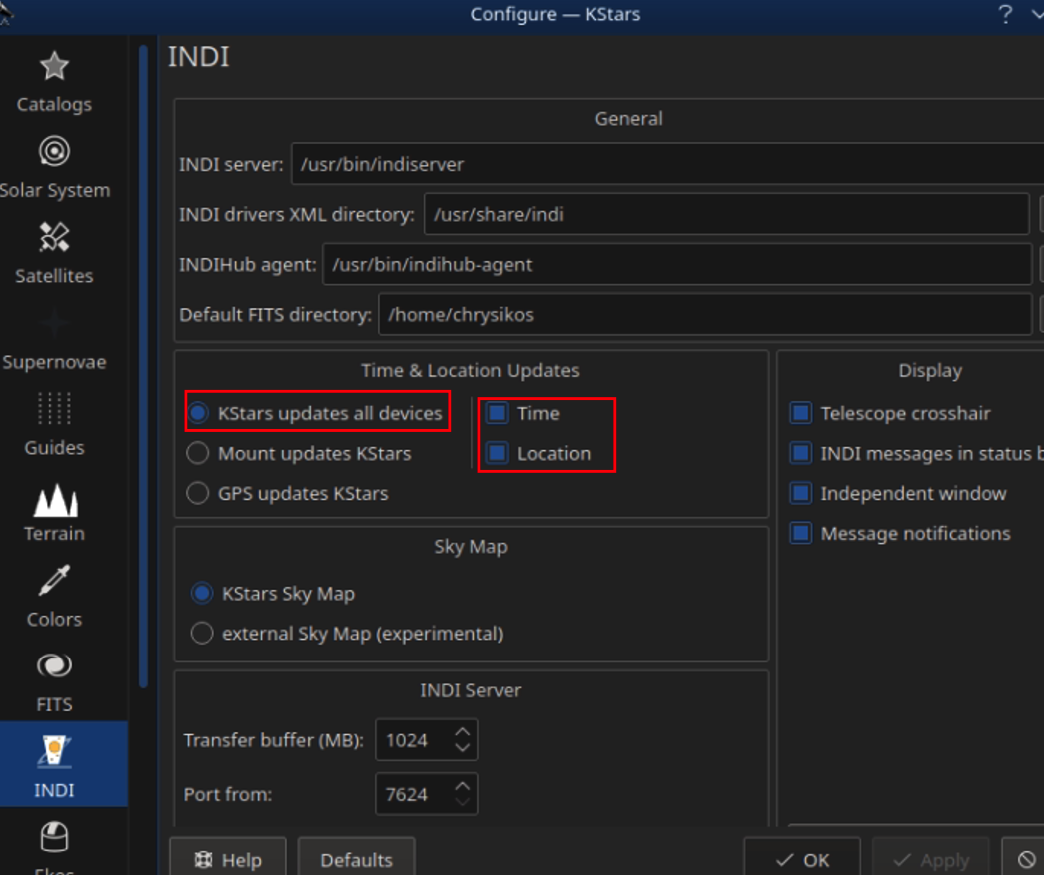
- Ensure that under INDI tab, you have checked Time and Location Updates. Tick Time, Location and Kstars updates all devices.

- Check Indilib drivers and locate “Pegasus NYX-101″ driver tab.
- Click Connect button.
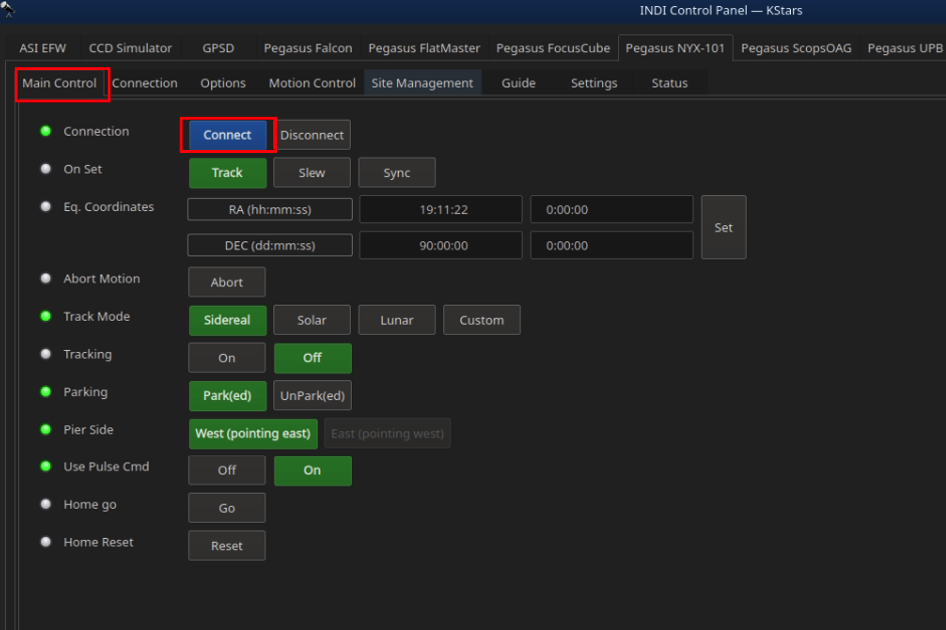
- Kstars will connect with the mount and list all available options.
- Click Tracking ON button or Unpark mount (if it is in park state) to unlock mount RA brake and operate the NYX-101 mount.

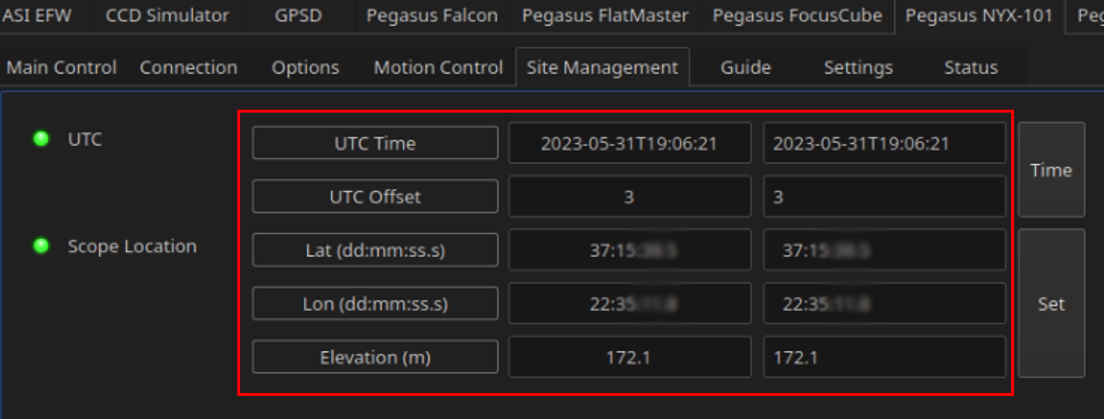
- The mount should have a valid site location, date, and time in order to be fully operational. If you encounter any issues ensure that these values have been pushed to mount. (Check Site Management tab).

- You are ready to go!
NYX-Mount has an internal non-volatile memory (FRAM type) that can hold data even after it is powered off. With more than 10 billion read/write cycles, the lifetime of this memory is essentially unlimited. This gives the advantage of continuously storing in memory the position of the motor (for both axes). If you switch off the mount, the last mount position is automatically retrieved on the boot sequence. (Note that this feature is available on firmware v1.3 and above)
To zero the mount position (set the home position) you have to manually slew both axes, using the keypad, to match the indicators.
Then click “Reset Home”. The setting will be stored in memory as a zero point.
In fact, they do work correctly!
Keypad moves mount to cardinal directions (N,S,E,W) and not to just a direction like left, right, up, or down.
An impression that direction is wrong can happen when the mount points close to NCP as the scope moves rightwards, towards the actual North. If you keep going past North and then press the South button it moves in the same direction as before because now that’s where South is from its last stationary position. Alternatively, if you pressed North a second time instead, the mount reverses direction compared to the first time you pressed the North button because that’s where the actual North is now.
The ASCOM drivers are automatically installed with the Unity Platform. Please ensure that you have the latest ASCOM release (6.6 or higher) before installing the Unity Platform.
NYX-Mounts fully conforms with ASCOM and software that use ASCOM such as SGPro, NINA, APT, MaximDL, etc.
Absolutely, you can connect to the NYX-Mount via a USB cable or via WiFi (802.11g). Our driver can automatically switch from WiFi to USB signaling.
The preferable protocol (by the driver) is the wired USB. By the time you plug the USB cable, the driver auto-selects the USB protocol and communicates with NYX-Mounts without data (ASCOM or software) disruption.
If you remove the USB cable, the mount automatically switches to the WiFi connection and continues to exchange information with your PC.
Your mobile phone comes with a GPS received so you can easily use our IOS / Android* application to connect to the NYX-Mount.
By the time you connect your smartphone with the mount, your site coordinates and date, time are pushed to the NYX-Mount engine.
*Mobile application will be available by the time of the mount launch.
Yes, NYX-Mounts in combination with Unity Platform and our ASCOM drivers supports satellite tracking (variable rates).
The satellite tracking functionality has been tested with SkyTrack software.
Please make sure you have firmware 1.19 and above
The mount can be controlled via our mobile application, our Unity Platform (Currently only for Windows), and of course our multi-client ASCOM server.
Also, It works out of the box with INDI protocol and any software that supports LX200 (E.g Sky Safari).
However, for users who would like to have a classic hand controller, we now provide an optional hand controller with a display.
It can be plugged into the ST4 port of the NYX-Mount and control the mount’s basic features (enable or disable tracking modes, Slewing to all known catalogs, arrow keys to center objects, etc).
A guiding rate close to 0.5 secs usually tends to create a “chase the seeing” effect, especially with focal lengths longer than 500mm.
We have read lots of reports and posts that strain wave (harmonic) mounts require 0.5secs of guiding rate. This is not the case with this mount.
We strongly recommend reading our Predictive PEC article
Yes, It is perfect for this mount.
The mechanical design with the strain wave reduction gears of the mount makes this impossible to be made. However, the adaptation of Saddle Powerbox includes this and much more.
The current design does not include or allow an installation of an RA tracking encoder. We try to keep the retail price as low as possible, so a high precision encoder (with less than 2 arcseconds of resolution) would add a significant cost to the NYX-Mount.
A safety power-off brake is Installed on the RA Axis and provides an instant safe stop during a planned or unplanned power interruption.
The brake supports and stops a payload of up to 20Kg (without counterweights)
The Nyx-Mount PSU supplies up to 5A, the Nyx-Mount will need from 0.7A to 2A, so you can feed the rest to your other device(s) using a GX12 to 2.1/2.5mm adapter.